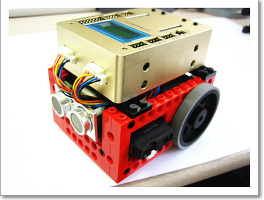
전체 글 (1955) 썸네일형 리스트형 [RobotController]서보모터를 이용한 지능형 조향로봇 제작 [RobotController]서보모터를 이용한 지능형 조향로봇 제작 DC Motor 2개와 서보모터를 이용하여 지능형 조향로봇을 제작 해봤다. 레고 바디를 이용하여 프레임 제작은 최대한 심플하게 제작 하였고 DC모터 드라이버와 제어 함수, 서보 모터 제어 함수를 제공하는 RobotController 로 쉽고 간단하게 조향 제어 로봇을 구현 가능 했다. 조향 부분은 위치 제어가 쉬운 서보모터 이용, 구동부는 DC모터를 이용 했다. 조향 제어 로봇 동영상 [MSC1200-S EVM] 보드 제작 [MSC1210-S EVM] 보드 제작 24bit 초정밀 ADC + 8051(33Mhz core) + SPI + DAC 포함된 다기능 초소형 마이컴 이다. 정말 작다. 24bit ADC에 128PGA증폭기 까지 있다니.. [Zigbee-s EVM] PCB제작 따뜬따끈한 Zibee모듈 PCB가 도착 했다. Chipcon CC2420 부착 [MSP430F2x EVM] 모듈과 연동해서 ZigBee데이터를 받을 수 있다. [RobotController] 스텝모터 제어 - 10cm 이동 하기 [RobotController] 스텝모터 제어 - 10cm 이동 하기 스텝모터를 이용하여 원하는 거리(cm)단위로 이동하기위해 먼저 1cm이동하기 위한 펄스수를 알아 보면 아래와 같다. [Robot Controller]에서 제공되는 스텝모터는 1펄스 출력시 0.9도 회전하는 모터 이다. 바퀴가 1회전(360도) 하려면 1pulse : 0.9도 = Xpulse : 360도 X = 400pulse 400펄스가 필요 합니다. 반지름 r = 2.6cm인 바퀴의 원주 길이는 2π x r = 16.3cm이고 1cm이동하기 위한 펄스의 수는 400pulse : 16.3cm = Xpulse : 1cm X = 24.53pulse 따라서 1cm이동하기 위해 24~25개의 펄스가 출력되면 된다. 원하는 거리(cm)로 이동하.. [RobotController] 스텝모터 가감속 제어 테스트 (AVR Robot Controller) [RobotController] 스텝모터 가감속 제어 테스트 (AVR Robot Controller) StepMotor Body(http://nexp.tistory.com/171) 조립후 스텝모터 가감속 제어 테스트를 했다. 스텝모터 가감속 테이블은 [스텝모터 가감속 테이블 생성기]를 이용했다. 스텝모터의 회전 속도는 스위칭 펄스의 주파수에 따라 결정되며 그림과 같은 특성을 가진다. 기동시 탈출 토크이상의 주파수로 구동하면 탈조가 된다. 따라서 기동시 낮은 주파수로 기동하여 점점 가속하여 정속 운전하고 정지시 점점 낮은 주파수로 기동하여 부드럽게 정지하는 가감속 구동법을 사용해야 한다. 로봇의 스텝모터는 기본적으로 가감속 구동을 하며 StmSetAcc()함수를 이용하여 기본 가감속, 등속, 사용자 정의 .. [RobotController]용 레고 스텝모터 바디 [RobotController]용 레고 스텝모터 바디 레고를 이용하면 임베디 로봇 컨크롤러 (http://nexp.tistory.com/135) 를 이용하여 스텝모터 로봇바디를 쉽게 제작 할 수 있다. 정말 심플하고 저렴한 가격으로 로봇 바디를 제작 해 보았다. 임베디 로봇 컨크롤러는 2개의 스텝모터 컨트롤 및 드라이버를 제공하고 API함수까지 제공하므로 간단한 로봇 제작에 편리하게 사용될 수 있다. ->AVR Robot Controller를 이용한 스텝모터 테스트 동영상 [Basic Base Board] 관련 자료 [Basic Base Board] 관련 자료 기본 확장 보드로 내가 만든 대부분의 MCU보드를 확장할 수 있는 보드 이다. 기본적으로 포트는 모두 빠져서 확장할 수 있고, 시리얼 포트 LCD, LED등의 간단한 테스트를 할수 있다. 기본 동작 테스트나 포트 테스트에 유용하게 사용된다. 뿐만 아니라 확장 Application Board에 연결할 수 있는 커넥터가 있다. 회로도 PC인터페이스 실습 장치와 호환되어 기존 코드를 그대로 사용할 수 있도록 구성되어 있고 실제로 PC에서 돌리던 여러가지 예제를 동일한 코드로바로 실습해 볼 수 있다. [ ez430 ] MSP430F2013 도트보드 테스트 [ ez430 ] MSP430F2013 도트보드 테스트 FET Tools에 포함되어 있는 MSP430F2013 도트보드의 LED를 제어하려면 저항을 연결해야 하는데 SMD-1005싸이즈라 구하기힘들어서 SMD-1608을 연결했다. 저항을 연결해야 LED예제를 테스트 해 볼수 있다. MSP430F2013 LED제어 소스코드 #include "msp430x20x3.h" void Delay(unsigned int Time) { while (Time--); } void main(void) { WDTCTL = WDTPW + WDTHOLD; // Stop watchdog timer P1DIR |= 0x01; // Set P1.0 to output direction for (;;) { P1OUT ^= 0x01; //.. 이전 1 ··· 230 231 232 233 234 235 236 ··· 245 다음