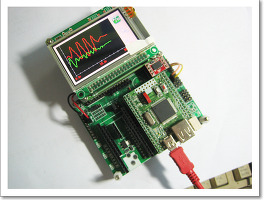
STM32F4 (38) 썸네일형 리스트형 [STM32-64 Ardu] STM32F405 보드 제작 STM32 64핀 패키지를 Arduino 로 사용할 수 있는 보드를 제작했다. Arduino 핀맵을 유지 하면서 가능한 최대로 작게 제작해 다양한 형태의 응용 보드 시리즈를 제작 할 예정이다. STM32 Nucleo Boards 보드와 핀맵을 동일하게 했고 Nucleo보드에 없는 USB, SD, I2C 같은 페리를 실장 하였으며 다양한 형태의 확장 보드(SSM- EVM), RF, BLE, WIFI 모듈을 연결 할수 있는 커넥터를 포함하였다. 또 하나의 장점으로 기존에 제작 해 둔 다양한 Arduino 확장 쉴드 보드로 연결 할 수 있다. [STM32F4-64 SM] STM32F415 보드 제작 ST Micro사의 STM32F4 시리즈중 64핀 패키지를 테스트 할수 있는 보드를 표준 핀맵의 SM-Type EVM 형태로 제작 했다. STM32F439 이더넷 TCP/IP 전송 속도 테스트 - STM32CubeMx Hal코드 이용 STM32F439에 내장된 이더넷을 연결할 수 있는 MAC가 포함되어 있고 Ethernet Phy 칩만 연결하면 쉽게 이더넷을 연결 할수 있다. 이번에는 STM32CubeMx를 이용하여 아주 간단하게 LwIP TCP / IP 스택을 올려서 테스트 해보았다. STM32F439 EVM 보드는 이더넷 Phy 칩을 연결하면 STM32F4의 이더넷을 테스트 할 수 있다. 이더넷 Phy는 칩을 직접 납땜하거나 Ethernet Phy 모듈을 연결 할 수 있다. Ethernet Phy 모듈은 핀맵을 표준화 해서 다양한 종류의 Ehternet Phy 칩을 테스트 할 수 있다. STM32CubeMx 를 이용하여 이더넷 인터페이스를 설정한다. Ethernet PHY는 RMII 모드로 연결되어 있기 때문에 모드를 RMII로 .. STM32F4 타이머 인터럽트 테스트 - 1초 만들기 STM32F4 타이머 인터럽트 테스트 STM32F4에서 TIM2, TIM5는 32bit 타이머 모드를 지원한다. 이를 이용하여 1초 만들기 테스트를 해 보았다. STM32F4 타이머 인터럽트 초기화 함수void TimerInit2(void){ TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; uint16_t PrescalerValue = 0; NVIC_InitTypeDef NVIC_InitStructure; /* TIM2 clock enable */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); /* TIM2 gloabal Interrupt 초기화 */ .. STM32F439 보드 테스트 - 주의사항 STM32F439 보드 테스트 - 주의사항 STM32F439 보드 제작해서 연결했는데 쇼트가 발생한다.데이터 시트를 보니 STM32F4와는 좀더 다른점이 있다. STM32F4데이터 시트에는 99번핀이 VDD or VSS라 되어 있는데...STM32F439에는 VSS로 되어 있다. (주의할 필요가 있다.) STM32F4x STM32F439 CortexM4 STM32F439 출시 CortexM4 STM32F439 출시ST사의 새로운 CortexM4인 STM32F439가 출시되었다.시스템 클럭이 160Mhz에서 180Mhz로 올랐고 플래시 메모리도 2M, SRAM도 256K로 성능이 업그레이드 되었다. 그리고 가장큰 특징으로 TFT LCD Controller가 추가되었다.SPI도 클럭과 채널이 6채널로 업되었다. SAI도 추가되었다. 아무튼 이정도면 최고 사양인듯하다. - 180 MHz ( 225 DMIPS)- 2 MB of Flash memory- 256+4 KB of SRAM- LCD-TFT controller up to SVGA resolution with dedicated Chrom-ART Accelerator™ for enhanced graphic content creat.. STM32F4 - VS1053 MP3 Module Test STM32F4 - VS1053 MP3 Module Test STM32F4 를 이용하여 MP3출력시 소비 전류 측정을 위해 [LCD-EXP EVM] 보드를 이용하여 테스트 했다. SPI클럭을 1.2mhz로 구동하고 클럭 분주를 1/2 로 설정하니 전류가 80mA -> 65mA로 줄어 들었다. 클럭을 좀더 낮추니 (1/4) 60mA로 줄어 든다. 이 상태에서도 MP3출력은 잘된다. 이때 SPI클럭을 좀더 올려 줬다. SPI1_InitStructure.SPI_BaudRatePrescaler=SPI_BaudRatePrescaler_8; static void SetSysClock(void) { : /* HCLK = SYSCLK / 1*/ // RCC->CFGR |= RCC_CFGR_HPRE_DIV1; RCC->C.. [STM32F4] I2C 테스트 - 3축 가속도 센서 TFT LCD 출력 [STM32F4] I2C 테스트 - 3축 가속도 센서 TFT LCD 출력 3축 가속도 센서를 테스트 해야할 일이 있어 STM32F407 보드를 이용하여 I2C 테스트를 해보았다. 기존 STM32F103 I2C 테스트 코드과 크게 차이 없이 테스트 가능했다. [EXP-NET EVM] 보드에는 I2C(SPI)로 연결되는 자이로, 가속도, 온도, 압력 센서등의 모듈을 연결할 수 있는 표준핀맵 커넥터가 있다. SM-Type EVM 에는 핀 8번에, M-Type EVM에는 핀 13번에 각각 CS핀이 할당되어 있다. STM32F4 I2C테스트 동영상STM32F407 을 이요하여 3가속도 센서의 데이터를 TFT-LCD에 그래프로 표시하는 테스트 예제 STM32F4 I2C 초기화 코드void i2c_init1(unsi.. 이전 1 2 3 4 5 다음