nRF52832 SSM 보드에는 9축 IMU센서 ICM-20948(MPU9250)가 실장되어 있다. 3축 자세 정보를 측정해서 BLE를 통해 전송하는 테스트를 해 보자.
BLE 서비스는 BLE-UART를 이용하고 ICM-20948(MPU9250)의 센서 데이터를 주기적(10ms)로 전송하는 코드
#include <bluefruit.h>
#include <MPU9250.h>
#define LED_BUILTIN 22
// BLE Service
BLEUart bleuart; // uart over ble
MPU9250 mpu;
void InitSensor(void)
{
Wire.begin();
delay(2000);
if (!mpu.setup(0x68)) { // change to your own address
while (1) {
Serial.println("MPU connection failed. Please check your connection with `connection_check` example.");
delay(5000);
}
}
//print_calibration();
mpu.verbose(false);
}
void print_roll_pitch_yaw(void) {
//Serial.print("Yaw, Pitch, Roll: ");
float Yaw, Pitch, Roll;
Roll = mpu.getRoll();
Pitch = mpu.getPitch();
Yaw = mpu.getYaw();
Serial.print(Roll, 2);
Serial.print(", ");
Serial.print(Pitch, 2);
Serial.print(", ");
Serial.println(Yaw, 2);
bleuart.print(Roll, 2);
bleuart.print(", ");
bleuart.print(Pitch, 2);
bleuart.print(", ");
bleuart.println(Yaw, 2);
}
void setup()
{
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, LOW);
Serial.begin(115200);
Serial.println("nRF52832 SSM BLE-UAR Test");
InitSensor();
// Setup the BLE LED to be enabled on CONNECT
Bluefruit.autoConnLed(true);
// Config the peripheral connection with maximum bandwidth
// more SRAM required by SoftDevice
// Note: All config***() function must be called before begin()
Bluefruit.configPrphBandwidth(BANDWIDTH_MAX);
Bluefruit.begin();
Bluefruit.setTxPower(4);
//콜백 함수 등록
Bluefruit.Periph.setConnectCallback(connect_callback);
Bluefruit.Periph.setDisconnectCallback(disconnect_callback);
// Configure and Start BLE Uart Service
bleuart.begin();
// Set up and start advertising
startAdv();
Serial.println("start advertising");
}
void startAdv(void)
{
// Advertising packet
Bluefruit.Advertising.addFlags(BLE_GAP_ADV_FLAGS_LE_ONLY_GENERAL_DISC_MODE);
Bluefruit.Advertising.addTxPower();
//bleuart 서비스 등록
Bluefruit.Advertising.addService(bleuart);
Bluefruit.ScanResponse.addName();
Bluefruit.Advertising.restartOnDisconnect(true);
Bluefruit.Advertising.setInterval(32, 244); // in unit of 0.625 ms
Bluefruit.Advertising.setFastTimeout(30); // number of seconds in fast mode
Bluefruit.Advertising.start(0); // 0 = Don't stop advertising after n seconds
}
void loop()
{
if (mpu.update()) {
static uint32_t prev_ms = millis();
if (millis() > prev_ms + 10) {
//print_rawdata();
print_roll_pitch_yaw();
//print_roll_pitch_yaw();
prev_ms = millis();
}
}
//BLE에서 데이터가 전송되면
while ( bleuart.available() )
{
uint8_t ch;
ch = (uint8_t) bleuart.read();
//시리얼 포트로 표시
Serial.write(ch);
if(ch=='a')digitalWrite(LED_BUILTIN, 0);
else if(ch=='b')digitalWrite(LED_BUILTIN, 1);
}
}
//연결시 수행되는 콜백 함수
void connect_callback(uint16_t conn_handle)
{
// Get the reference to current connection
BLEConnection* connection = Bluefruit.Connection(conn_handle);
char central_name[32] = { 0 };
connection->getPeerName(central_name, sizeof(central_name));
Serial.print("Connected to ");
Serial.println(central_name);
}
//연결 해제시 수행되는 콜백함수
void disconnect_callback(uint16_t conn_handle, uint8_t reason)
{
(void) conn_handle;
(void) reason;
Serial.println();
Serial.print("Disconnected, reason = 0x"); Serial.println(reason, HEX);
}
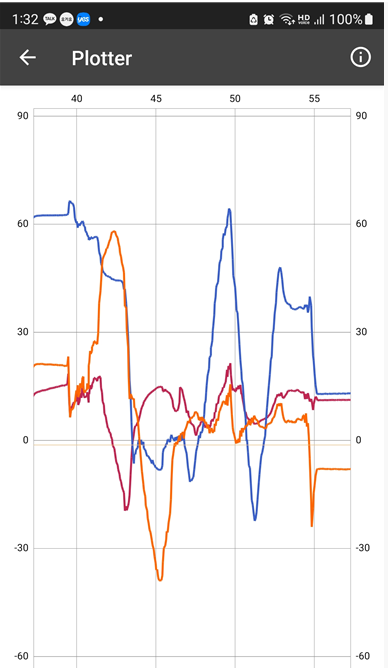
프로그램 실행후 접속해서 그래프로 출력하면 ICM-20948(MPU9250)의 센서의 Roll, Pitch, Yaw 값이 출력 되는 것을 확인 할 수 있다.
반응형



