[AX-12] 모터 관련자료 및 테스트

robotis AX-12 모터 제어
AX-12모터는 마이컴 내장 독립형 서보 보터로, AVR등의 소형 마이컴에서 UART로 쉽게 서보모터의 위치 및 속도 제어가 가능하다.
테스트 동영상
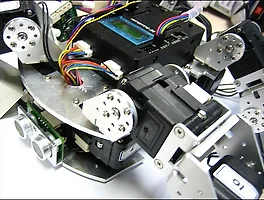
로롯팔 테스트 동영상
- 속도 제어 및 위치 제어
커넥터 연결
테스트 동영상
로롯팔 테스트 동영상
- 속도 제어 및 위치 제어
커넥터 연결
전원 7~12V인가 하고 Data핀에 UART TX로 제어, 모터의 상태값을 수신하려면 부가 회로가 필요하다.

송수신을 위한 부가 회로

AX-12 모터 제어를 위한 커넥터 연결

송수신을 위한 부가 회로
AX-12 모터 제어를 위한 커넥터 연결
제어 패킷 구조


check = ~(Id+5+3+Address+((Pos>>8)&0xFF)+(Pos&0xFF));
ax_SendPacket(check);
}
위치 제어

기타 Address

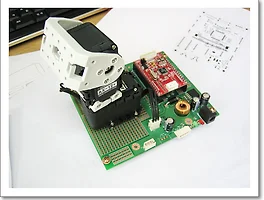
다축 서보모터 제어 보드제작 - 관련 자료

다축 서보모터 제어를 위한 PCB도착해서 보드조립 및 테스트 진행.
다축 서보모터 제어 PC소프트웨어
VC++.NET을 이용하여 작성
기본 속도 및 위치 제어를 위한 함수
void SendPosSpd(unsigned char Id, unsigned char Address, unsigned int Pos)
{
unsigned char check = 0;
ax_SendPacket(0xff);
ax_SendPacket(0xff);
ax_SendPacket(Id);//id
ax_SendPacket(5);//length
ax_SendPacket(0x03);//instruction
ax_SendPacket(Address);//address
ax_SendPacket(Pos&0xFF);
ax_SendPacket((Pos>>8)&0xFF);
{
unsigned char check = 0;
ax_SendPacket(0xff);
ax_SendPacket(0xff);
ax_SendPacket(Id);//id
ax_SendPacket(5);//length
ax_SendPacket(0x03);//instruction
ax_SendPacket(Address);//address
ax_SendPacket(Pos&0xFF);
ax_SendPacket((Pos>>8)&0xFF);
check = ~(Id+5+3+Address+((Pos>>8)&0xFF)+(Pos&0xFF));
ax_SendPacket(check);
}
위치 제어
기타 Address
다축 서보모터 제어 보드제작 - 관련 자료
다축 서보모터 제어를 위한 PCB도착해서 보드조립 및 테스트 진행.
다축 서보모터 제어 PC소프트웨어
VC++.NET을 이용하여 작성
 |
반응형