[SCP1000-D01] 압력센서 테스트

테스트 동영상
SCP1000-D01 압력센서를 이용하여 바닥에서(설정값) 고도에 대한 차이값을 표시
압력값의 표시는 지난번 제작해 두었던 SPI제어 FND모듈 이용하여 압력의 차이값표시를 간단하게 했다.

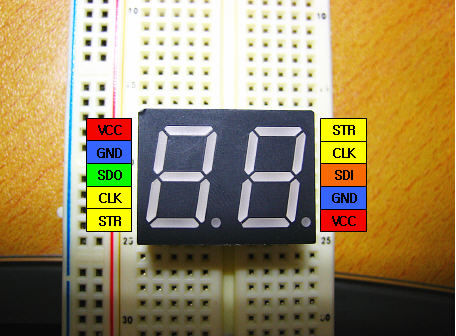
FND모듈 핀맵
엘리베이터 1~5층 까지 압력 측정 데이터


SCP1000 예제 소스코드 (AVR Mega128)
void Write_Direct_Access_SPI(unsigned char address, unsigned char data)
{
address = (address << 2); // #1, shift the SCP1000 reg address to left by 2
address |= 0x02; // #2, set write bit to one (RW=1)
while(number_of_bytes-- > 0)
{
value <<= 8;
// Read data byte from MCU SPI register
value |= SPI0_WriteReadByte(0);
}
// Set CSB to HIGH
PRESSURE_CS_DEASSERT();
return value;
}
void init_scp1000(void)
{
unsigned int DATA;
unsigned char i;
PRESSURE_CS_INIT();
PRESSURE_CS_DEASSERT();
SPI0_Init();
SPI0_MODE0();
SPI0_CLK_DOULBE();
SPI0_CLK_DIV128();
Delay(60); // #3, 60ms wait
DebugPrint("\r\nDATA: ");
for(i = 6; i > 0 ; i--)
{
DATA = Read_Direct_Access_SPI(0x07, 1);// #4, read STATUS register --> LSB '0'=OK
DebugPrint("%02X ", DATA);
if(!(DATA & 0x0001))break;
Delay(10);
}
if(i == 0)
{
//fail();
DebugPrint("\r\nSTATUS register error\r\n");
return;
}
DebugPrint("STATUS(%d)=0x%02X\r\n", i, DATA);
DATA = Read_Direct_Access_SPI(0x1F, 1); // #5, read DATARD8 register --> LSB '1'=OK
if(!(DATA && 0x0001))
{
//fail();
DebugPrint("DATA(%02X) register error\r\n", DATA);
}
Write_Indirect_Access_SPI(0x2D, 0x03); // #6, Low noise configuration
Delay(100); // #7, wait for 100ms
Write_Direct_Access_SPI(0x03, 0x00); // Reset operation mode
Delay(10); // Wait before change new mode
Write_Direct_Access_SPI(0x03, 0x09);
// measurement mode (0x0A)
Delay(100);
}
테스트 동영상
SCP1000-D01 압력센서를 이용하여 바닥에서(설정값) 고도에 대한 차이값을 표시
압력값의 표시는 지난번 제작해 두었던 SPI제어 FND모듈 이용하여 압력의 차이값표시를 간단하게 했다.
FND모듈 핀맵
엘리베이터 1~5층 까지 압력 측정 데이터
void Write_Direct_Access_SPI(unsigned char address, unsigned char data)
{
address = (address << 2); // #1, shift the SCP1000 reg address to left by 2
address |= 0x02; // #2, set write bit to one (RW=1)
//set CSB to low
PRESSURE_CS_ASSERT();
// #4, write register address byte (8bits)
SPI0_WriteByte(address);
// #5, write data byte (8bit) to line
SPI0_WriteByte(data);
// Set CSB to HIGH
PRESSURE_CS_DEASSERT();
}
PRESSURE_CS_ASSERT();
// #4, write register address byte (8bits)
SPI0_WriteByte(address);
// #5, write data byte (8bit) to line
SPI0_WriteByte(data);
// Set CSB to HIGH
PRESSURE_CS_DEASSERT();
}
unsigned int Read_Direct_Access_SPI(unsigned char address, unsigned char number_of_bytes)
{
unsigned int value;
value = 0;
address = (address << 2); //shift the SCP1000 reg address to left by 2
PRESSURE_CS_ASSERT();
//write register address byte (8bits)
SPI0_WriteByte(address);
{
unsigned int value;
value = 0;
address = (address << 2); //shift the SCP1000 reg address to left by 2
PRESSURE_CS_ASSERT();
//write register address byte (8bits)
SPI0_WriteByte(address);
while(number_of_bytes-- > 0)
{
value <<= 8;
// Read data byte from MCU SPI register
value |= SPI0_WriteReadByte(0);
}
// Set CSB to HIGH
PRESSURE_CS_DEASSERT();
return value;
}
unsigned int Read_Indirect_Access_SPI(unsigned char address)
{
unsigned long value;
Write_Direct_Access_SPI(0x02, address); // #1, write reg address to ADDPTR (0x02)
Write_Direct_Access_SPI(0x03, 0x01); // #2, write 0x01 to OPERATION (0x03)
Delay(10); // #3, wait 10ms
value = Read_Direct_Access_SPI(0x20, 0x02); // #4, read two bytes from DATARD16 (0x20)
return value;
}
{
unsigned long value;
Write_Direct_Access_SPI(0x02, address); // #1, write reg address to ADDPTR (0x02)
Write_Direct_Access_SPI(0x03, 0x01); // #2, write 0x01 to OPERATION (0x03)
Delay(10); // #3, wait 10ms
value = Read_Direct_Access_SPI(0x20, 0x02); // #4, read two bytes from DATARD16 (0x20)
return value;
}
void Write_Indirect_Access_SPI(unsigned char address, unsigned char data)
{
Write_Direct_Access_SPI(0x02, address); // #1, write reg address to ADDPTR (0x02)
Write_Direct_Access_SPI(0x01, data); // #2, write reg data to DATAWR (0x01)
Write_Direct_Access_SPI(0x03, 0x02); // #3, write 0x02 to OPERATION (0x03)
Delay(50); // #4, wait 50ms
}
{
Write_Direct_Access_SPI(0x02, address); // #1, write reg address to ADDPTR (0x02)
Write_Direct_Access_SPI(0x01, data); // #2, write reg data to DATAWR (0x01)
Write_Direct_Access_SPI(0x03, 0x02); // #3, write 0x02 to OPERATION (0x03)
Delay(50); // #4, wait 50ms
}
void init_scp1000(void)
{
unsigned int DATA;
unsigned char i;
PRESSURE_CS_INIT();
PRESSURE_CS_DEASSERT();
SPI0_Init();
SPI0_MODE0();
SPI0_CLK_DOULBE();
SPI0_CLK_DIV128();
Delay(60); // #3, 60ms wait
DebugPrint("\r\nDATA: ");
for(i = 6; i > 0 ; i--)
{
DATA = Read_Direct_Access_SPI(0x07, 1);// #4, read STATUS register --> LSB '0'=OK
DebugPrint("%02X ", DATA);
if(!(DATA & 0x0001))break;
Delay(10);
}
if(i == 0)
{
//fail();
DebugPrint("\r\nSTATUS register error\r\n");
return;
}
DebugPrint("STATUS(%d)=0x%02X\r\n", i, DATA);
DATA = Read_Direct_Access_SPI(0x1F, 1); // #5, read DATARD8 register --> LSB '1'=OK
if(!(DATA && 0x0001))
{
//fail();
DebugPrint("DATA(%02X) register error\r\n", DATA);
}
Write_Indirect_Access_SPI(0x2D, 0x03); // #6, Low noise configuration
Delay(100); // #7, wait for 100ms
Write_Direct_Access_SPI(0x03, 0x00); // Reset operation mode
Delay(10); // Wait before change new mode
Write_Direct_Access_SPI(0x03, 0x09);
// measurement mode (0x0A)
Delay(100);
}
unsigned short GetPressure(void)
{
unsigned long pressure;
pressure = (uint32_t)((0x0007) & Read_Direct_Access_SPI(0x1F, 1));
pressure <<= 16; // shift 3MSB bits to left by 16
pressure |= (uint32_t)Read_Direct_Access_SPI(0x20, 2);
pressure >>= 2; // Convert to [Pa] by dividing the 19 bit
DebugPrint("%ld\r\n", 0x7FFFF&pressure);
}
{
unsigned long pressure;
pressure = (uint32_t)((0x0007) & Read_Direct_Access_SPI(0x1F, 1));
pressure <<= 16; // shift 3MSB bits to left by 16
pressure |= (uint32_t)Read_Direct_Access_SPI(0x20, 2);
pressure >>= 2; // Convert to [Pa] by dividing the 19 bit
DebugPrint("%ld\r\n", 0x7FFFF&pressure);
}
반응형



