[AmoroRobot] 풀테스트, 물체 검출 및 카메라센서로 물체 구분 하여 처리
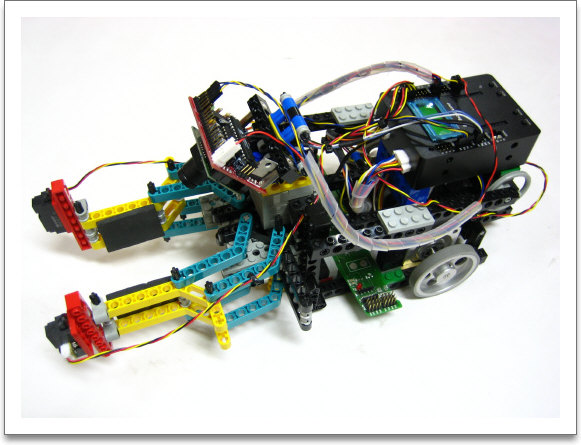
임베디드 로봇 컨트롤러 (http://nexp.tistory.com/135)와 레고를 이용하여 만든 AmorRobot 테스트
[2005/07/25]
Amoro Robt 경기 규칙을 적용하여 풀 주행 테스트 했다.
처음 출발하여 초음파 센서를 이용하여 물체를 검출하고 검출된 물체를 들어 올려 카메라 센서로 물체 색깔을 구분하여 정해진 트래이로 이동하여 처리하도록 구성 하였다.
[2005/07/25]
Amoro Robt 경기 규칙을 적용하여 풀 주행 테스트 했다.
처음 출발하여 초음파 센서를 이용하여 물체를 검출하고 검출된 물체를 들어 올려 카메라 센서로 물체 색깔을 구분하여 정해진 트래이로 이동하여 처리하도록 구성 하였다.
반응형

