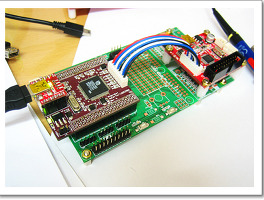
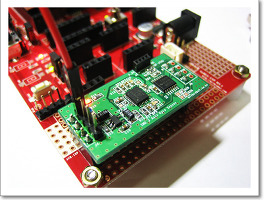
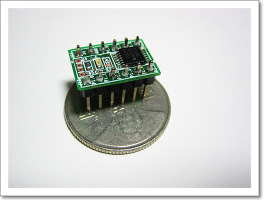
전체 글 (1955) 썸네일형 리스트형 [LM3S2965] 모터 드라이버 베이스 보드 제작 [LM3S2965] 모터 드라이버 베이스 보드 제작 Luminary Micro사의 Cortex-M3코어 LM3S2965 보드를 이용한 모터제어 베이스 보드를 제작 했다. LM3S2965는 2채널 Encoder, PWM 6, ADC, CAN 이터페이스를 내장하여 모터 제어용으로 사용하기 좋아 모터 드라이버 테스트 용으로 만들어 보았다. Motor Driver 보드의 LM3S2965 QEI핀맵 Motor PWM 핀맵 Motor2 -> PWM2, PB3, PG4 Motor3 -> PWM3, PF5, PF6 센서모듈 제작 - MSP430F2013 + 2축 GyroSensor 센서모듈 제작 - MSP430F2013 + 2축 GyroSensor 2축 자이로 센서와 MSP430을 이용한 소형 센서모듈을 제작 하였다. 테스트 중... MSP430F2013 을이용한 16Bit ADC 데이터 수집 테스트 MSP430F2013 을이용한 16Bit ADC 데이터 수집 테스트 MSP430F2013은 UART가 Timer로 구현할 수 있고 2400Bps로 상당히 느려서 I2C를 이용하여 데이터를 수집하는 테스트를 진행 하였다. 구조는 아래와 같고 PC(USB) -> AVR ( I2C Master) -> MSP430F2013(I2C Slave) 16비트 데이터 수집하여 그래프로 표시한 결과 변환값은 옵셋이 있는것 같고 OSR1024로 설정한 데이터가 좀더 일정한것 같다. 입력전압 100mV Gain1, OSR256 (digital filter) SD16CCTL0 = SD16UNI + SD16IE + SD16OSR_256; 입력전압 100mV Gain1, OSR1024 (digital filter) SD16CCTL.. [MSP430F2013 EVM] 클럭 시스템 및 속도 측정 MSP430 GPIO 토글 해서 클럭 설정에 따른 CPU속도를 측정했다. 프로그램 코드 while(1) { P1OUT ^= LED1_BIT; } ASM코드 측정 결과 1Mhz DCO : 6us 8Mhz DCO: 740ns 665Khz 16Mhz DCO : 360ns 1.4Mhz (AVR속도 측정 참고) 클럭 설정부분 코드 수정 //Set range :1, 8, 12, 16Mhz #if (__SYS_CLK__ == SYS_CLK_1MHZ) #define CALBC1_FREQ CALBC1_1MHZ #define CALDC0_FREQ CALDCO_1MHZ #elif (__SYS_CLK__ == SYS_CLK_8MHZ) #define CALBC1_FREQ CALBC1_8MHZ #define CALDC0_FREQ.. [MSP430F2013-SS EVM] 초소형 MSP430F2013 보드 제작 [MSP430F2013-SS EVM] 초소형 MSP430F2013 보드 제작 초소형, 초 저전력 MSP430F2013 보드를 제작해 보았다. 테스트용도로 가끔 소형 모듈이 필요한데... 간단한 마이컴이 필요한 상황에서 유용하게 사용할 수 있다. 확장 테스트 보드 Luminary BLDC Motor Driver DK 테스트 Luminary BLDC Motor Driver DK 테스트 BLDC Motor Controller Consol Board CAN 인터페이스로 Driver보드에 속도 및 위치 제어 신호를 보내는 역할을 하는 테스트 보드로 CAN으로 Driver 보드의 펌웨어까지 업데이트 가능하다. Luminary Micro의 BLDC Motor Driver CAN인터페이스로 속도 및 위치 제어 신호를 받아 모터를 제어 하거나 외부에서 PWM, Direction 신호를 공급해 모터를 드라이브 할 수있다. 테스트 동영상 Host MCU(LM3S2965)에서 CAN통신으로 전압설정을 하면 모터가 구동되는 예제로 12V까지 설정 가능하다. CAN ID는 12개 까지 설정 가능하다. 소스코드() Feature • Quiet co.. [LM3S2965] 관련자료 [LM3S2965] 관련자료 예제소스 MSP430 I2C 테스트 - USCI(H/W SM) vs USI (MSP430F2013 S/W SM I2C) Universal Serial Interface MSP430F2013은 USI모듈로 SPI, I2C인터페이스를 제공한다. I2C는 USCI를 지원하는 상위 MSP430과 같은 풀 하드웨어로 동작하는것은 아니고 소프트웨어 State Machine를 구현해야 한다. 이때문에 약간 귀찮은 작업을 해 주어야 한다. 물론 속도도 느려지지만 그나마 소형 모듈에서 쉽게 구현할 수 있다는 장점이 있다. 소프트웨어 SM 구조 Slave 구현 1)Master에서 Start + (7bit+1bit)Address를 전송하고 NACK를 기다린다. 2)Slave에서 Address가 맞으면 NACK를 전송한다. 3)Slave에서 Data 전송한다. 4)Master에서 Data수신후 NACK를 송신 5)Slave에서 NACK수신 6.. 이전 1 ··· 151 152 153 154 155 156 157 ··· 245 다음