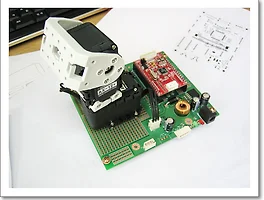
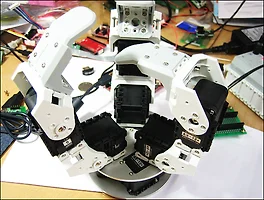
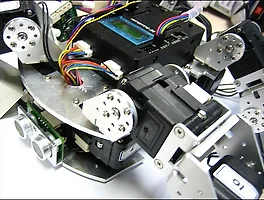
[ROBOT]/Robot (9) 썸네일형 리스트형 PanTilt Servo Motor Controller 보드 제작 PanTilt Servo Motor Controller 보드 제작 모터는 AX-12 모터를 이용할 수 있도록 했고, MCU는 AVR, ARM, Cortex-M3, PIC등 원하는 종류로 연결할 수 있도록 커넥터 처리 하였고, 기타 다른 테스트도 할수 있도록 고려하여 제작했다. [AX-12] 모터 관련자료 및 테스트 [AX-12] 모터 관련자료 및 테스트 robotis AX-12 모터 제어 AX-12모터는 마이컴 내장 독립형 서보 보터로, AVR등의 소형 마이컴에서 UART로 쉽게 서보모터의 위치 및 속도 제어가 가능하다. 테스트 동영상 로롯팔 테스트 동영상 - 속도 제어 및 위치 제어 커넥터 연결 전원 7~12V인가 하고 Data핀에 UART TX로 제어, 모터의 상태값을 수신하려면 부가 회로가 필요하다. 송수신을 위한 부가 회로 AX-12 모터 제어를 위한 커넥터 연결 제어 패킷 구조 기본 속도 및 위치 제어를 위한 함수 void SendPosSpd(unsigned char Id, unsigned char Address, unsigned int Pos) { unsigned char check = 0; ax_Sen.. [ DX - Motor ] 로봇컨트롤러를 이용한 지능형 서보모터 제어 [ DX - Motor ] 로봇컨트롤러를 이용한 지능형 서보모터 제어 제어예제 DX - Motor 연결도 DX - Motor Application 서보모터 + CMU CAM을 이용한 물체 식별 로봇팔 테스트 서보모터 + CMU CAM을 이용한 물체 식별 로봇팔 테스트 CMU CAM카메라 센서 모듈 테스트동영상 [RobotController]서보모터를 이용한 지능형 조향로봇 제작 [RobotController]서보모터를 이용한 지능형 조향로봇 제작 DC Motor 2개와 서보모터를 이용하여 지능형 조향로봇을 제작 해봤다. 레고 바디를 이용하여 프레임 제작은 최대한 심플하게 제작 하였고 DC모터 드라이버와 제어 함수, 서보 모터 제어 함수를 제공하는 RobotController 로 쉽고 간단하게 조향 제어 로봇을 구현 가능 했다. 조향 부분은 위치 제어가 쉬운 서보모터 이용, 구동부는 DC모터를 이용 했다. 조향 제어 로봇 동영상 [RobotController] 스텝모터 제어 - 10cm 이동 하기 [RobotController] 스텝모터 제어 - 10cm 이동 하기 스텝모터를 이용하여 원하는 거리(cm)단위로 이동하기위해 먼저 1cm이동하기 위한 펄스수를 알아 보면 아래와 같다. [Robot Controller]에서 제공되는 스텝모터는 1펄스 출력시 0.9도 회전하는 모터 이다. 바퀴가 1회전(360도) 하려면 1pulse : 0.9도 = Xpulse : 360도 X = 400pulse 400펄스가 필요 합니다. 반지름 r = 2.6cm인 바퀴의 원주 길이는 2π x r = 16.3cm이고 1cm이동하기 위한 펄스의 수는 400pulse : 16.3cm = Xpulse : 1cm X = 24.53pulse 따라서 1cm이동하기 위해 24~25개의 펄스가 출력되면 된다. 원하는 거리(cm)로 이동하.. [RobotController] 스텝모터 가감속 제어 테스트 (AVR Robot Controller) [RobotController] 스텝모터 가감속 제어 테스트 (AVR Robot Controller) StepMotor Body(http://nexp.tistory.com/171) 조립후 스텝모터 가감속 제어 테스트를 했다. 스텝모터 가감속 테이블은 [스텝모터 가감속 테이블 생성기]를 이용했다. 스텝모터의 회전 속도는 스위칭 펄스의 주파수에 따라 결정되며 그림과 같은 특성을 가진다. 기동시 탈출 토크이상의 주파수로 구동하면 탈조가 된다. 따라서 기동시 낮은 주파수로 기동하여 점점 가속하여 정속 운전하고 정지시 점점 낮은 주파수로 기동하여 부드럽게 정지하는 가감속 구동법을 사용해야 한다. 로봇의 스텝모터는 기본적으로 가감속 구동을 하며 StmSetAcc()함수를 이용하여 기본 가감속, 등속, 사용자 정의 .. [RobotController]용 레고 스텝모터 바디 [RobotController]용 레고 스텝모터 바디 레고를 이용하면 임베디 로봇 컨크롤러 (http://nexp.tistory.com/135) 를 이용하여 스텝모터 로봇바디를 쉽게 제작 할 수 있다. 정말 심플하고 저렴한 가격으로 로봇 바디를 제작 해 보았다. 임베디 로봇 컨크롤러는 2개의 스텝모터 컨트롤 및 드라이버를 제공하고 API함수까지 제공하므로 간단한 로봇 제작에 편리하게 사용될 수 있다. ->AVR Robot Controller를 이용한 스텝모터 테스트 동영상 이전 1 2 다음