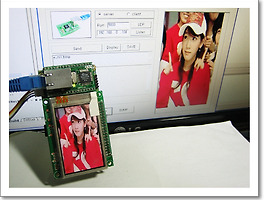
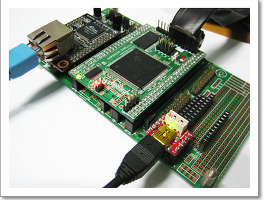
W5100 (55) 썸네일형 리스트형 [AT90USB1287-EX] Ehternet Test - W5100 TCP/IP 루프백 테스트 [AT90USB1287-EX] Ehternet Test - W5100 TCP/IP 루프백 테스트 [AT90USB1287-EX] 보드는 하드웨어 TCP/IP 모듈인 W5100/W5200 을 연결할 수 있여 이더넷 관련 테스트를 쉽게 진행할 수 있다. 물론 AT90USB1287-EX 보드는 ATmega128도 호환 되기 때문에 동일하게 동작 시킬 수 있다. 먼저 개발 환경 설정을 해 보면... 하드웨어 TCP/IP 스택이므로 쉽게 이더넷 구현이 가능한데, 드라이버 폴더의 wizent에서 W5100관련 w5100.c, socket.c 만 삽입하면 된다. 그리고 메인 소스코드에 아래를 인클루드 한다. #include "w5100.h" #include "socket.h" 다음은 네트웍 설정을 해 준다. W5100.. [CANTUS-EX] 이더넷을 이용한 움직이는 이미지파일 전송 테스트 [CANTUS-EX] 이더넷을 이용한 움직이는 이미지파일 전송 테스트 [CANTUS-EX] 보드는 저렴한 고속 이더넷 솔루션으로 제작한 보드이다. AVR가격 보다 저렴하지만 고속의 메모리제어 방식을 적용하면 고속 이더넷이 가능하다. 초기 기능 테스트를 위해 이더넷으로 GIF이미지를 전송하여 LCD에 출력하는 테스트를 진행 해 보았다. 아직 외부 메모리 부분의 속도를 고속으로 하기는 무리가 있지만, 이더넷으로 이미지 전송하는 기본 테스트는 가능하기 때문에 간단한 테스트를 해 보았다. CANTUS 이더넷을 이용항 이미지 전송 테스트 동영상 [CANTUS-EX] 보드가 TCP서버로 동작하며 Client에서 움직이는 GIF이미지를 설정하면 이미지를 받아와 TFT-LCD에 출력하는 테스트 이다. [STM32F4] W5100/W5200 TPC/IP Loopback 전송 속도 테스트 [STM32F4] W5100/W5200 TPC/IP Loopback 전송 속도 테스트 SPI 최대 클럭 21Mhz에서 3.5Mbps 정도 나온다. 빠르긴 한데.. 아쉬운 점은 168Mhz MCU인데 속도가 기대한 만큼은 나오지 않는것 같다. (PIC32 CP/IP 전송 속도 테스트 결과 와 비교하면 80Mhz PIC32가 더 빠르게 나온다) SPI클럭 설정을 좀더 자유롭게 할 수 있으면 좋을것 같은데.... SPI FIFO가 없어 그런것 같은데... DMA를 이용하면 좀더 빨라지지 않을까? ------------------------------------------------------------ [7] iInChip Send: 3.5567 Mbps(5278574 bytes, 11.3230 sec) iI.. [CANTUS EX EVM] W5100 외부 메모리로 제어하기 - W5100 Direct Mode TCP전송 속도 [CANTUS EX EVM] W5100 외부 메모리로 제어하기 - W5100 Direct Mode TCP전송 속도 [CANTUS-EX EVM] 보드의 W5200 CS는 nCS2(6008_0000h)에 할당되어 있다. 일단 간단히 W5100 제어 레지스터에 값을 읽고 쓰는 테스를 해 보자 #define COMMON_BASE 0x60080000 #define SHAR0 (COMMON_BASE + 0x0009) while(1) { //W5100 MAC 레지스터에 값 쓰기 *((vuint8*)(COMMON_BASE+SHAR0 )) = data; Delay(500); //MAC 레즈스터값 읽기 temp = *((vuint8*)(COMMON_BASE+SHAR0 )); DebugPrint("read=%x\r\n", .. [DSP28335 EVM] Hardware TCP/IP W5300 TCP전송 테스트 - TMS320F28335 [EXP-ALL EVM] [DSP28335 EVM] Hardware TCP/IP W5300 TCP전송 테스트 - TMS320F28335 [EXP-ALL EVM] [EXP-ALL EVM] 보드에는 wiznet사의 고속 Hardwired TCP/IP W5300모듈을 연결할 수 있다. TMS320F28335 외부 메모리 인터페이스로 제어 하면 고속의 이더넷 데이터를 전송할 수 있기 때문에 여러가지 실험해 볼것이 많을것 같다. (좀더 자세한 내용은 TM320F28335 W5300포팅 참고) [EXP-ALL EVM] 의 W5300모듈 연결 회로도 TMS320F28335는 16비트 모드를 지원하기 때문에 R49, R1을 제거한다. W5300의 CS는 TMS320F28335 의 CS0에 연결한다. TMS320F28335를 이용하여 W5300.. [W5200 EVM] TCP 전송 속도 테스트 [W5200 EVM] TCP 전송 속도 테스트 W5200을 이용하여 MCU별로 TCP/IP Loopback 전송 속도를 테스트 해 보았다. MCU별 SPI최대 속도도 참고 할 수 있는 자료가 될것 같다. TCP/IP 전송 속도 테스트 결과 참고 PIC32 마이크로 칩사의 PIC32는 SPI최대 속도가 20Mhz임에도 불구 하고 4MBps정도 까지 출력된다. SPI로 데이터 읽고 쓰는데 상당히 빠른것 같다. 저렴하면서 성능이 좋아 가장 마음에 든다. dsPIC33 SPI클럭 13Mhz 에서 최대로 나오며 2.4Mbps 정도 출력 된다. [3] iInChip Send: 2.3772 Mbps(6596649 bytes, 21.1710 sec) iInChip Recv: 2.4131 Mbps(6596649 byte.. [W5200 EVM] 보드 제작 [W5200 EVM] 보드 제작 하드웨어 TCP/IP 스택을 지원하는 W5100의 신버전 W5200 테스트 보드를 제작했다. SPI방식만 지원해서 더 소형 으로 제작 가능하다. SPI 클럭속도가 훨씩 더 빨라지고 8개의 스택을 지원하므로 웹서와 같은 어플리케이션에 저렴하고 간단하게 적용할 수 있다. 기존 W5100 EVM과 비교해서 크기가 더 작아지고 기존 보드와 핀맵을 동일하게 제작하여 확장보드에 연결 가능하다. W5200, W5100 확장 테스트 보드 [NET-EVM] [W5200 EVM] 핀맵 회로도 [PIC32] W5200(W5100) TCP/IP Boopback 전송 속도 Test [PIC32] W5200(W5100) TCP/IP Boopback 전송 속도 Test 마이크로 칩사의 PIC32는 SPI최대 속도가 20Mhz임에도 불구 하고 4MBps정도 까지 출력된다. SPI로 데이터 읽고 쓰는데 다른 MCU보다 상당히 빠른것 같다. 저렴하면서 성능이 좋아 가장 마음에 든다. (SPI 효율은 가장 뛰어난것 같다.) TCP/IP 전송 속도 테스트 결과 참고 PIC32 W5200 제어 HAL 드라이버 코드 #define _SPI0_ENABLE 1 //----------------------------------------------------------------------------- // W5100 HAL #define W5100_CS_PORT LATG #define W5100_CS.. 이전 1 2 3 4 5 ··· 7 다음