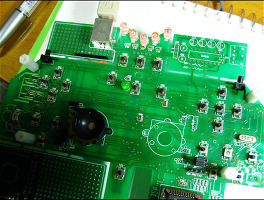
USB (60) 썸네일형 리스트형 [ TUSB3210 EVM ] 부트모드 및 개발환경 설정 펌웨어 다운로드 TUSB3210은 8052코어를 가지고 있고 내부 ROM에 부트 코드가 라이트되어 있다. 전원 투입시 기본 부트로더가 실행되고 이 부트로더는 EEPROM 또는 USB을 통해 사용자 코드를 램에 다운로드 한다. 먼더 외부 EEPROM에 사용자 코드가 없다면 USB디바이스로 동작해 기본 드라이버(ApLoader.SYS)를 찾고 이 드라이버와 정상 통신을 하면 사용자 펌웨어(TUSB3210.BIN or TUSB2136.BIN)를 램에 다운로드 하게 된다. 이후 램에 있는 사용자 코드가 실행된다. ->이 파일은 inf파일에서 변경할 수 있다. 부트로더가 찾는 먼저 기본 드라이버를 설치 한다. 드라이버를 설치하면 디바이스 드라이버(ApLoader.SYS)와 기본 펌웨어( TUSB3210.BIN ).. [ TUSB3210 EVM ] 보드 제작 - USB + 8052 Core MCU [ TUSB3210 EVM ] 보드 제작 - USB + 8052 Core MCU 8051 Core에 USB가 포함되어 있는 TI의 TUSB3210보드를 제작해 보았다. 무료 샘플 가능한 칩이고 8051코어라 쉽고 재미있는것 많이 해 볼수 있을것 같아 만들어 봤는데... 그당시 상당히 심플하고 괜찮은 칩 이었다. 물론 이후 프로젝트에서 사용을 했지만 값싸고 USB솔루션 필요 할때 간편하게 사용할 수 있는 칩이다. 펌웨어는 내부 부트로더롬이 있어 EEPROM 또는 USB를 통해 램에 올려 실행하는 방식인데.. USB로 펌웨어를 올리는 형식이라 개발 단계에서 상당히 편리 했다. 궂이 USB를 사용하지 않더라도 8051스터디 할때도 상당히 편리하다. 확장 보드도 만들어 간단히 포트 테스트나 LCD제어 등이 가능.. Mouse Keyboard Joystick 복합기 프로토 보드 제작 Mouse Keyboard Joystick 복합기 프로토 보드 제작 PC용 Mouse + Keyboard + Joystick 복합기 개발을 위해 프로토 타입 형태로 제작했다. 케이스 제작도 염려해 두고 테스트용으로 제작 했다. 쉽게 연결할 수 있는 USB커넥터나 디버깅용 RS232 시리얼 포트, 기타 빵판형태의 SMD컨버터를 두어 편리하게 테스트 할 수 있도록 제작했다. 당시 가격때문에 내부 매모리가 워낙 적은 MCU라 외부에 확장메모리 커넥터를 두어 개발할때 넉넉한 메모리로 할수 있었다. 1차 목업케이스 적용 [USBN9602 EVM] USB + AVR Mega16 보드제작 사양 - CPU AVR(ATMega163)사용. - USB Interface USBN9603사용. Ez-Application Board에 올라갈 USB 테스트 보드겸 AVR(MEGA163) PCB제작를 이용하여 AVR Test Board제작 하였다. 이전 1 ··· 5 6 7 8 다음