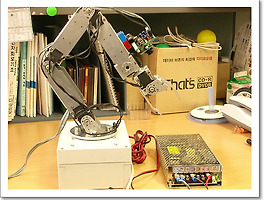
Robot Arm (3) 썸네일형 리스트형 [AmoroRobot2] Serovo motor - Object search and grap [AmoroRobot2] Serovo motor - Object search and grap [AmoroRobot2] 서보모터 이용한 로봇팔 실험 [AmoroRobot2] 서보모터 이용한 로봇팔 실험 -물체를 들기 위해 로봇팔을 내리는 모습 -물체를 들어 올리는 모습 소스코드 //============================================================================= // Test Program - DX Motor Robot Arm Test // // // [arm.c] //============================================================================= /* - DX-Motor를 이용하여 로봇팔 제어 예제 - Ez-RoboMaster의 AI Motor포트 DX-Motor(2번째 라인)에 DX-모터를 연결한다. - Dx-Motor은 3개를 이.. 서보모터 + CMU CAM을 이용한 물체 식별 로봇팔 테스트 서보모터 + CMU CAM을 이용한 물체 식별 로봇팔 테스트 CMU CAM카메라 센서 모듈 테스트동영상 이전 1 다음