임베디드 로봇 컨트롤러 개발
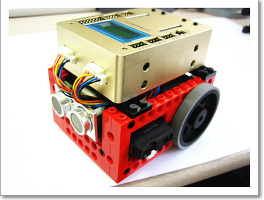
임베디드 로봇 컨트롤러 개발 -회로 설계 -API작성 -블루투스 통신보드 제작 -자체 충전 보드 제작 -응용 소프트웨어 작성 -교재 작성 -각 대학별 판매 CPU : AVR Core (Atmega128, Atmega8) 2 Step Motor, 4 DC Motor, 8 ADC, Bat Charger, RF, IR, Bluetooth, 펌웨어 작성, API, ActiveX 블록도 * 2004년 7월 예전 회사 다닐때 만든 제품 테스트 보드 응용 작품 Amor Robot : StepMotor, DC Motor, IR Sensor, Ultra sonic Sensor, Camera Module 적용 서보모터를 이용한 조향 로봇 서보 모터를 이용한 로보팔 Amoro Robot 스텝모터, DC모터, 서보모터, 카메..
임베디드 로봇 컨트롤러 개발
임베디드 로봇 컨트롤러 개발 -회로 설계 -API작성 -블루투스 통신보드 제작 -자체 충전 보드 제작 -응용 소프트웨어 작성 -교재 작성 -각 대학별 판매 CPU : AVR Core (Atmega128, Atmega8) 2 Step Motor, 4 DC Motor, 8 ADC, Bat Charger, RF, IR, Bluetooth, 펌웨어 작성, API, ActiveX 블록도 * 2004년 7월 예전 회사 다닐때 만든 제품 테스트 보드 응용 작품 Amor Robot : StepMotor, DC Motor, IR Sensor, Ultra sonic Sensor, Camera Module 적용 서보모터를 이용한 조향 로봇 서보 모터를 이용한 로보팔 Amoro Robot 스텝모터, DC모터, 서보모터, 카메..