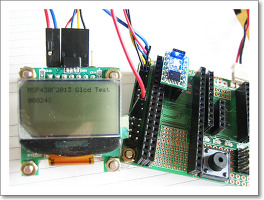
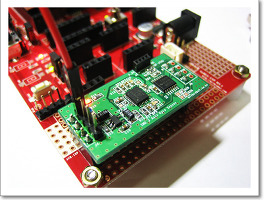
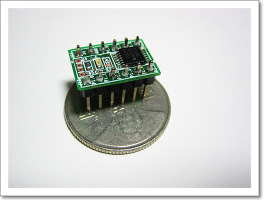
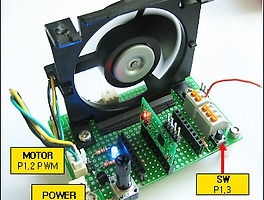
MSP430F2013 (19) 썸네일형 리스트형 [MSP430F2013-SS EVM] SSD1815 초소형 그래픽 LCD테스트 [MSP430F2013-SS EVM] SSD1815 초소형 그래픽 LCD테스트 SSD1815 드라이버를 사용하는 초소형 그래픽 LCD모듈을 [MSP430F2013-SS EVM]에서 테스트 했다. MSP430F2013은 Flash Memory가 2k byte밖에 되지 안기 때문에 코드 사이즈에 신경을 써야 한다. 전체 구조를 바꾸고 옵티마이즈 결과 2k내로 충분히 들어오는것 같다. 아래는 컴파일 결과이다. 812 bytes of CODE memory 51 bytes of DATA memory (+ 8 absolute ) 502 bytes of CONST memory SSD1815 그래픽 모듈은 최소 4핀의 포트만 있으면 되므로 P1.0~P1.3으로 연결하면된다. 사용한 확장보드는 [Ethernet Test.. [MSP430F2013-SS EVM] 보드 관련자료 [MSP430F2013-SS EVM] 보드 관련자료 300mil 간격의 초소형 MSP430F2013 모듈을 제작 했다. ez430-FET와 호환되므로 쉽게 펌웨어 다운로드 가능하다. MSP430F2013 예제소스 * MSP430 개발환경설정 MSP430F2013 회로도 [MSP430F2013-SS EVM] 확장 보드 MSP430F2013 SSD1815 GLCD 테스트 MSP430 I2C 전송 속도 테스트 MSP430 I2C 전송 속도 테스트 MSP430F2013 보드는 UART가 없어 I2C로 데이터를 수집테스트 정리 구성도 MSP430F2013 (I2C Slave) ->AVR (I2C Master) -> USB2Serial -> PC Host AVR - > 8Mhz 구동 MSP430F2013 -> 16Mhz구동 2Byte 데이터 수집 속도 측정 H/W 구동시 100Khz 구동시 450us 소요된다. 150Khz 까지 구동 가능하고 이때는 300us 소요된다. (200Khz 이상부터 깨지기 시작한다.) ->메인클럭을 16Mhz까지 올리니 400khz도 문제 없이 잘 동작한다. S/W I2C 구현시 AVR 8Mhz클럭에서 600us 소요된다. H/W I2C 구현 예제 unsigned char ReadByt.. 센서모듈 제작 - MSP430F2013 + 2축 GyroSensor 센서모듈 제작 - MSP430F2013 + 2축 GyroSensor 2축 자이로 센서와 MSP430을 이용한 소형 센서모듈을 제작 하였다. 테스트 중... [MSP430F2013 EVM] 클럭 시스템 및 속도 측정 MSP430 GPIO 토글 해서 클럭 설정에 따른 CPU속도를 측정했다. 프로그램 코드 while(1) { P1OUT ^= LED1_BIT; } ASM코드 측정 결과 1Mhz DCO : 6us 8Mhz DCO: 740ns 665Khz 16Mhz DCO : 360ns 1.4Mhz (AVR속도 측정 참고) 클럭 설정부분 코드 수정 //Set range :1, 8, 12, 16Mhz #if (__SYS_CLK__ == SYS_CLK_1MHZ) #define CALBC1_FREQ CALBC1_1MHZ #define CALDC0_FREQ CALDCO_1MHZ #elif (__SYS_CLK__ == SYS_CLK_8MHZ) #define CALBC1_FREQ CALBC1_8MHZ #define CALDC0_FREQ.. [MSP430F2013-SS EVM] 초소형 MSP430F2013 보드 제작 [MSP430F2013-SS EVM] 초소형 MSP430F2013 보드 제작 초소형, 초 저전력 MSP430F2013 보드를 제작해 보았다. 테스트용도로 가끔 소형 모듈이 필요한데... 간단한 마이컴이 필요한 상황에서 유용하게 사용할 수 있다. 확장 테스트 보드 MSP430 I2C 테스트 - USCI(H/W SM) vs USI (MSP430F2013 S/W SM I2C) Universal Serial Interface MSP430F2013은 USI모듈로 SPI, I2C인터페이스를 제공한다. I2C는 USCI를 지원하는 상위 MSP430과 같은 풀 하드웨어로 동작하는것은 아니고 소프트웨어 State Machine를 구현해야 한다. 이때문에 약간 귀찮은 작업을 해 주어야 한다. 물론 속도도 느려지지만 그나마 소형 모듈에서 쉽게 구현할 수 있다는 장점이 있다. 소프트웨어 SM 구조 Slave 구현 1)Master에서 Start + (7bit+1bit)Address를 전송하고 NACK를 기다린다. 2)Slave에서 Address가 맞으면 NACK를 전송한다. 3)Slave에서 Data 전송한다. 4)Master에서 Data수신후 NACK를 송신 5)Slave에서 NACK수신 6.. [MSP430F2x EVM]을 이용한 어플리케이션 2 - SW로 DC모터 제어 [MSP430F2x EVM]을 이용한 어플리케이션 2 - SW로 DC모터 제어 MSP430F2013 EVM의 P1.2(TA1) PWM출력을 이용하여 DC모터를 제어하는 예제 P.3에 연결된 스위치를 누르면 PWM주기를 가변하여 DC모터 속도를 변경하도록 함 [DC모터 제어 동영상] 스위치를 누르면 PWM 주기가 증가하고 모터의 속도가 증가한다. 이전 1 2 3 다음