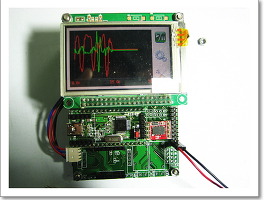
Kinetis (11) 썸네일형 리스트형 K20 EVM - Kinetis Cortex-M4 TFT LCD 테스트 K20 EVM - Kinetis Cortex-M4 TFT LCD 테스트 Cortex-M4 코어를 가진 K20 EVM보를 이용하여 TFT-LCD 출력 테스트를 했다.50Mhz에서 400x320 픽셀의 TFT LCD에 1프레임 출력하는데 18ms정도 소요된다. [NET-EVB SM] 확장 테스트 보드를 이용하여 SD Card의 BMP이미지를 출력하도록 했다. K20 EVM TFT LCD 출력 테스트 동영상 K20 TFT LCD 드라이버 소스코드정리//-----------------------------------------------------------------------------#define _SPI0_IO_INIT()PORTD_PCR0 = PORT_PCR_MUX(0x2);\PORTD_PCR1 = P.. K20 EVM - Kinetis Cortex-M4 K20 16bit ADC 테스트 K20 EVM - Kinetis Cortex-M4 K20 16bit ADC 테스트 Kinetis 시리즈는 기존 Cortex-M 시리즈들에서 보기 힘든 16bit ADC를 기본으로 내장하고 있다. K20 시리즈의 경우 특히 ADC부분에 기능이 풍부해 아날로그에 있어 강점이 있는것 같다.특히 HW 평균필터가 내장되어 있어 32 Sample까지 필터링 가능하다. K20 ADC테스트 동영상K20 EVM 보드를 이용하여 가변저항에 연결된 전압값을 ADC해서 그래프로 출력하는 테스트를 진행해 보았다. K20 의 ADC 블록도 K20 ADC 레지스터아주 복잡해 보이지만 자세히 보면 ADCx_SC1 레지스터만 설정하면 아주 간단히 ADC를 할 수 있도록 되어 있다. 5-DIFFDifferential mode enabl.. K20 EVM - SPI 테스트 3축 가속도 센서값을 TFT LCD 그래프로 표시하기 K20 EVM - SPI 테스트 3축 가속도 센서값을 TFT LCD 그래프로 표시하기 SPI 를 쉽고 재미 있게 테스트하기 위해 가속도 센서를 활용할 수 있다. LIS3LV02 3축 가속도 센서를 SPI모드로 설정하고 확장 EVM보드에 연결하여 테스트 할 수 있다. SPI 방식으로 센서를 설정하거나 3축 가속도 센서값을 읽을 수 있다. K20 SPI모드 가속도 센서 테스트 동영상 K20 가속도 센서 테스트 드라이버 코드//-----------------------------------------------------------------------------// myAccel3LV02 HAL#define MY_ACCEL3LV02_SPI_MODE1#define MY_ACCEL3LV02_I2C_MODE0 #.. K20 EVM - Kinetis Cortex-M4 SPI 테스트1 K20 EVM - Kinetis Cortex-M4 SPI 테스트 Cortex-M4 K20 SPI 관련 자료 정리.SPI클럭은 최대 25로 동작한다. K20 SPI블록도 K20 SPI 제어 레지스터MKL25Z 보다 기능이 많아서 레지스터가 많이 복잡해 졌다. 하지만 SPIx_MCR, SPIxCTA 레지스터만 보면 대부분의 기본 기능을 사용할 수 있다. 물론 다양한 설정으로 좀더 복잡한 기능을 구현 가능하다. 11 CLR_TXFClear TX FIFOFlushes the TX FIFO. Writing a 1 to CLR_TXF clears the TX FIFO Counter. The CLR_TXF bit is alwaysread as zero.0 Do not clear the TX FIFO counter.1.. K20 EVM - Kinetis Cortex-M4 K20 UART 테스트 K20 EVM - Kinetis Cortex-M4 K20 UART 테스트 K20의 UART는 일반 UART 3채널로 구성되어 있다. PTA1 -> UART0_RXPTA2 -> UART0_TX PTB16 ->UART0_RXPTB17 ->UART0_TX PTD6 -> UART0_RXPTD7 -> UART0_TX PTC3 ->UART1_RXPTC4 ->UART1_TX PTD2 ->UART2_RXPTD3 ->UART2_TX UART clockingUART0 and UART1 modules operate from the core/system clock, which provides higherperformance level for these modules. All other UART modules operate f.. FRDM-KL25Z 를 이용한 Kinetis 디버거(SWD JTAG) 제작하기 FRDM-KL25Z 를 이용한 Kinetis 디버거(SWD JTAG) 제작하기 FRDM-KL25Z는 만원대의 저렴한 Kenetis 개발도구 임에도 불구하고 SWD JTAG 디버거를 내장하고 있다.개발보드 내의 KL25Z를 디비깅 할수 도 있고 다른 보드의 Kinetis (Cortex-M0, Cortex-M4 등)를 디버깅 할 수도 있다. 다만 JTAG를 외부로 사용하기 위해 하드웨어적으로 처리를 좀 해 주어야 한다.물론 간단히 작업 가능하다. JTAG 내부 외부 설정 점퍼 작업 FreeScale Cortex-M4 Kinetis K20 EVM 보드제작 FreeScale Cortex-M4 Kinetis K20 EVM 보드제작 소매가 기준 3000원대 저렴한 Cortex-M4 가 눈에 띄어 보드 제작해 보았다.저렴하며 소형이며 성능또한 나쁘지 않아 SM-Type EVM 형태로 제작 해서 기존 확장 테스트 보드에서 호환할 수 있도록 했다. K20은 128K Flash, 16K Ram, 50Mhz로 동작하는 저렴한 Cortex-M4 코어이다. 물론 속도는 느리지만 저렴함을 강점으로 내새우고 있다. M4코어 이므로 FPU를 지원한다. 그리고 16bit ADC, 12bit DAC를 내장하고 있어 아날로그 파트도 강점이다.엘레파츠에서 소량 구매시 3천원대에 구매할 수 있다. K20 EVM 보드는 기존 여러 확장 보드에 연결하여 테스트 가능하다. MP3 확장 테스트.. [FRDM-KL25Z] Kinetis - SPI 테스트 [FRDM-KL25Z] Kinetis - SPI 테스트 KL25Z SPI 테스트를 위한 자료 정리 SPI Bus clockBus clock Up to 50 MHz Up to 4 MHz MCGOUTCLK clock divider KL25Z SPI 초기화 함수void SPI0_Init(void){SIM_SCGC5 |= SIM_SCGC5_PORTD_MASK; //Turn on clock to D module SIM_SCGC4 |= SIM_SCGC4_SPI0_MASK; //Enable SPI0 clock _SPI0_IO_INIT();/*PORTD_PCR0 = PORT_PCR_MUX(0x2); //Set PTD0 to mux 2 [SPI0_PCS0] PORTD_PCR1 = PORT_PCR_MUX(0x2); //S.. 이전 1 2 다음