[STM32F373 EVM] I2C 테스트 - 9축 IMU 센서 테스트
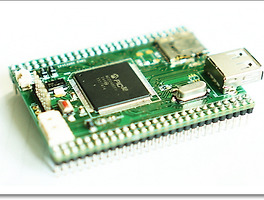
[STM32F373 EVM] I2C 테스트 - 9축 IMU 센서 테스트 [STM32F373 EVM]에는 I2C가 PB8(SCL), PB9(SDA)에 할당되어 있다. I2C테스트를 위해 9축 IMU센서(BNO055 EVM)의 롤,피치 값을 TFT LCD에 표시하는 예제를 작성해 보았다. PB8 -> SPI2_SCK/I2S2_CK,I2C1_SCL, USART3_TX,CAN_RX, CEC, TIM16_CH1,TIM4_CH3, TIM19_CH3,COMP1_OUT, TSC_SYNC PB9 -> SPI2_NSS/I2S2_WS,I2C1_SDA, USART3_RX,CAN_TX, IR_OUT,TIM17_CH1, TIM4_CH4,TIM19_CH4, COMP2_OUT STM32F373 EVM 회로도 핀맵 STM32F373의..
[STM32F373 EVM] I2C 테스트 - 9축 IMU 센서 테스트
[STM32F373 EVM] I2C 테스트 - 9축 IMU 센서 테스트 [STM32F373 EVM]에는 I2C가 PB8(SCL), PB9(SDA)에 할당되어 있다. I2C테스트를 위해 9축 IMU센서(BNO055 EVM)의 롤,피치 값을 TFT LCD에 표시하는 예제를 작성해 보았다. PB8 -> SPI2_SCK/I2S2_CK,I2C1_SCL, USART3_TX,CAN_RX, CEC, TIM16_CH1,TIM4_CH3, TIM19_CH3,COMP1_OUT, TSC_SYNC PB9 -> SPI2_NSS/I2S2_WS,I2C1_SDA, USART3_RX,CAN_TX, IR_OUT,TIM17_CH1, TIM4_CH4,TIM19_CH4, COMP2_OUT STM32F373 EVM 회로도 핀맵 STM32F373의..